Previously, chassis support of large crawler excavators were dependent upon utilization of a single, large diameter, hydraulic cylinder. In order to preclude damage to transported loads in the event of a single cylinder failure, a clustering of cylinders was designed for the transporter suspension system. A single cylinder would not only have to provide proper leveling, but it would have to resist side loads introduced by wind as well as propel and steering conditions. Horizontal forces acting on a fixed vertical cylinder produce bending, and, if forces are of significant magnitude, they will cause hydraulic oil leakage, galling and possible failure.
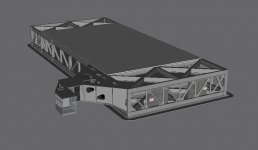
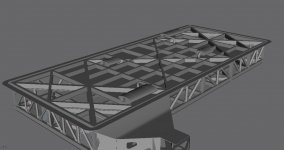
To prevent introducing shearing forces into the hydraulic actuators, a unique arrangement was designed for the four double-track truck suspension system. In the center of each truck is 1.22 (4-foot) diameter guide tube that slides in a spherical bearing. Clustered around this guide tube are four linear single acting hydraulic cylinders with a 508-millimeter (20-inch) bore and an extensible stroke of 2006 millimeters (79 inches). The cylinder assembly on which the weight of the transported load rests is designed to operate at a normal pressure of 20.7 million newtons/m² (4800 psig), and to withstand 41.2 million newtons/m² (6000 psig) proof pressure and 62.3 million newtons/m² (9000 psig) burst pressure. The support cylinders are attached to the chassis and trucks with spherical ball bushings to assure that only vertical loads are transmitted.
Shear forces from propel, steering or winds loads are transmitted through the guide tube and into the chassis through a spherical bearing housed on the trucks. This not only removes horizontal loads from the cylinders but provides a pivot for the truck and permits vertical movement of the chassis in relation to the crawler truck. The guide tube fits into the cylindrical inside surface of a bronze ball bushing. The outside surface of the bushing is a spherical section that mates with the inside surface of a concentric bushing container. This assembly enables limited tilt of the trucks in any combination of lateral and longitudinal motion. Changes in the vertical position of the chassis and rotational positions of the crawlers are supplied to the steering and JEL servo systems by transducers mounted at the bottom of the guide tube assembly.
The extremely low vertical friction allowed by this mechanism has provided for smooth leveling and jacking operations This unique grouping has resisted large wind loads, having carried a Saturn V test vehicle (Saturn 500F) on board a Mobile Launcher 5.63 kilometers (3.5 miles) at 0.04 m/s (1 mile/h) in winds as high as 30.1 m/s (68 mile/h) without incident. After more than eight years of operation, there have been no hydraulic leakage from these cylinders, and none have even had to be removed or partially disassembled.