Are the drive trucks actually turning? Normally tracked vehicles turn by slowing down the tracks on one side, which is why I was wondering what the degree markings meant. My guess is that turning the steering wheel 1 degree actually slows down the trucks on one side as if the trucks were turned one degree.
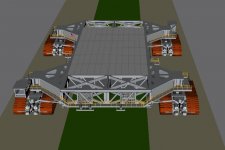
Actually, the drive trucks do turn. The long cylinders you see that connects the trucks with the chassis of the CT is called steering arms. They push/pull the trucks as required to execute the turns.
The key to maneuvering the CT is planning ahead. They actually slow the CT down in the turns while executing gradual increases in turn angle. This technique allows the CT to perform the steep turns required with minimum turning of the trucks required.
---------- Post added at 10:08 AM ---------- Previous post was at 08:58 AM ----------
According to my research the turn radius of the CT is 152 m.
---------- Post added at 06:40 PM ---------- Previous post was at 10:08 AM ----------
If you haven't seen them here's a nice detailed tour of CT-1:
Part 1: [nomedia="http://www.youtube.com/watch?v=IArsG6w9oSo"]YouTube- Inside the NASA Crawler Transporter - PART 1 of 3[/nomedia]
Part 2: [nomedia="http://www.youtube.com/watch?v=TvWz06BvO4A"]YouTube- Inside the NASA Crawler Transporter - PART 2 of 3[/nomedia]
Part 3: [nomedia="http://www.youtube.com/watch?v=1uB5femx858"]YouTube- Inside the NASA Crawler Transporter - PART 3 of 3[/nomedia]
---------- Post added at 06:51 PM ---------- Previous post was at 06:40 PM ----------
CT steering is covered in Part 3 starting at 00:50.
---------- Post added at 10:18 PM ---------- Previous post was at 06:51 PM ----------
Here's the procedure for starting the move of the CT:
- Verify that EXCITER ON indicator is RED lit
- Check with ground observer and request clearance to begin move
- De-select brakes by depressing the BRAKE PBI
- Select desired movement direction by depressing either the FWD or REV PBI(only one can be depressed at any one time)
- De-select neutral by depressing the NEUT PBI
- Use SPEED CONTROL knob to increase CT speed gradually
- Verify brake discs are moving after completing step 6
This is from an episode of the Discovery Channel show "Dirty Jobs", specifically season 3, episode 5 where Mike Rowe goes to KSC and gets familiar with the CT by cleaning/relubing one of the two CTs after which he gets to take the CT out for a short road test.
")