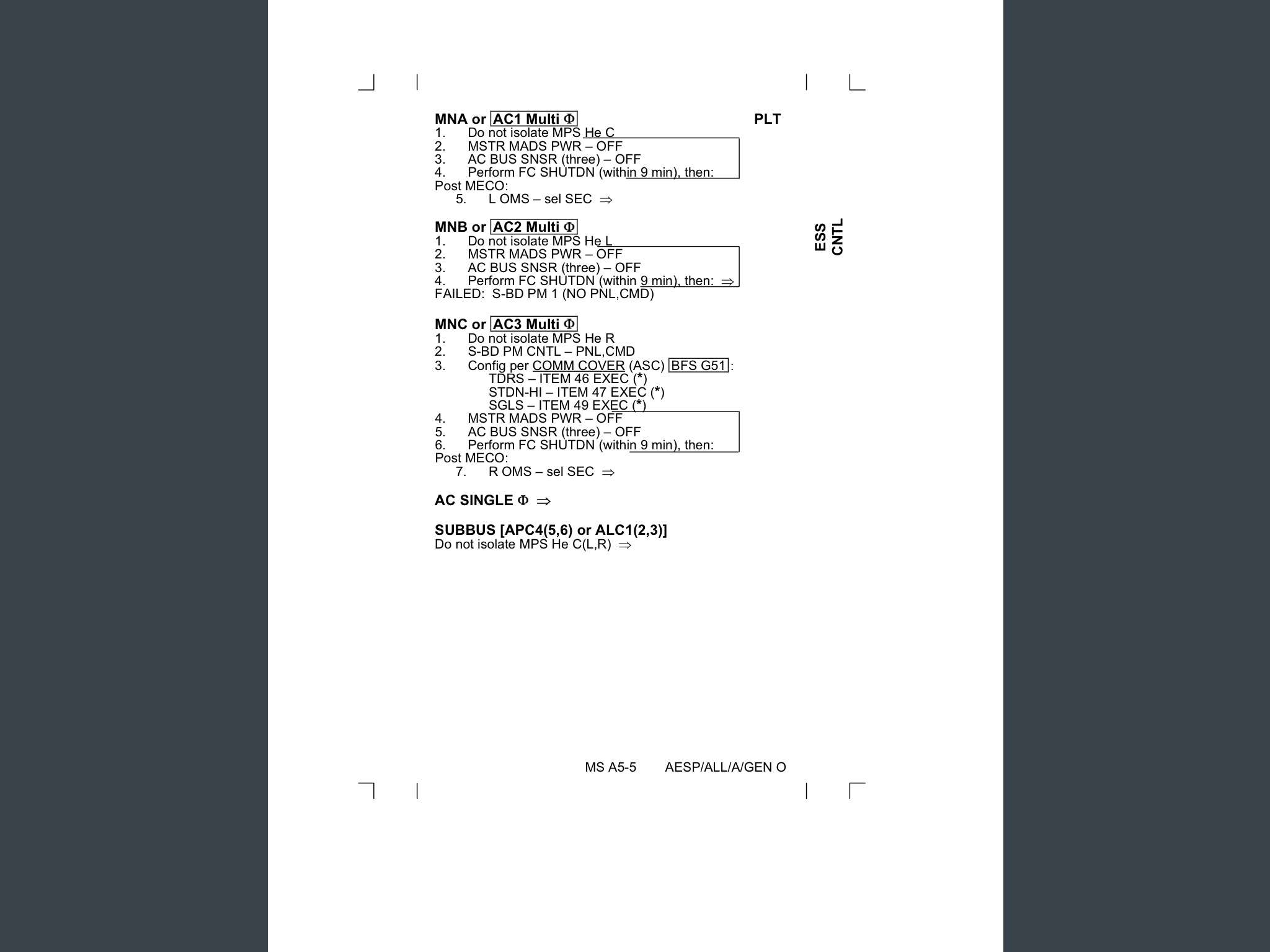
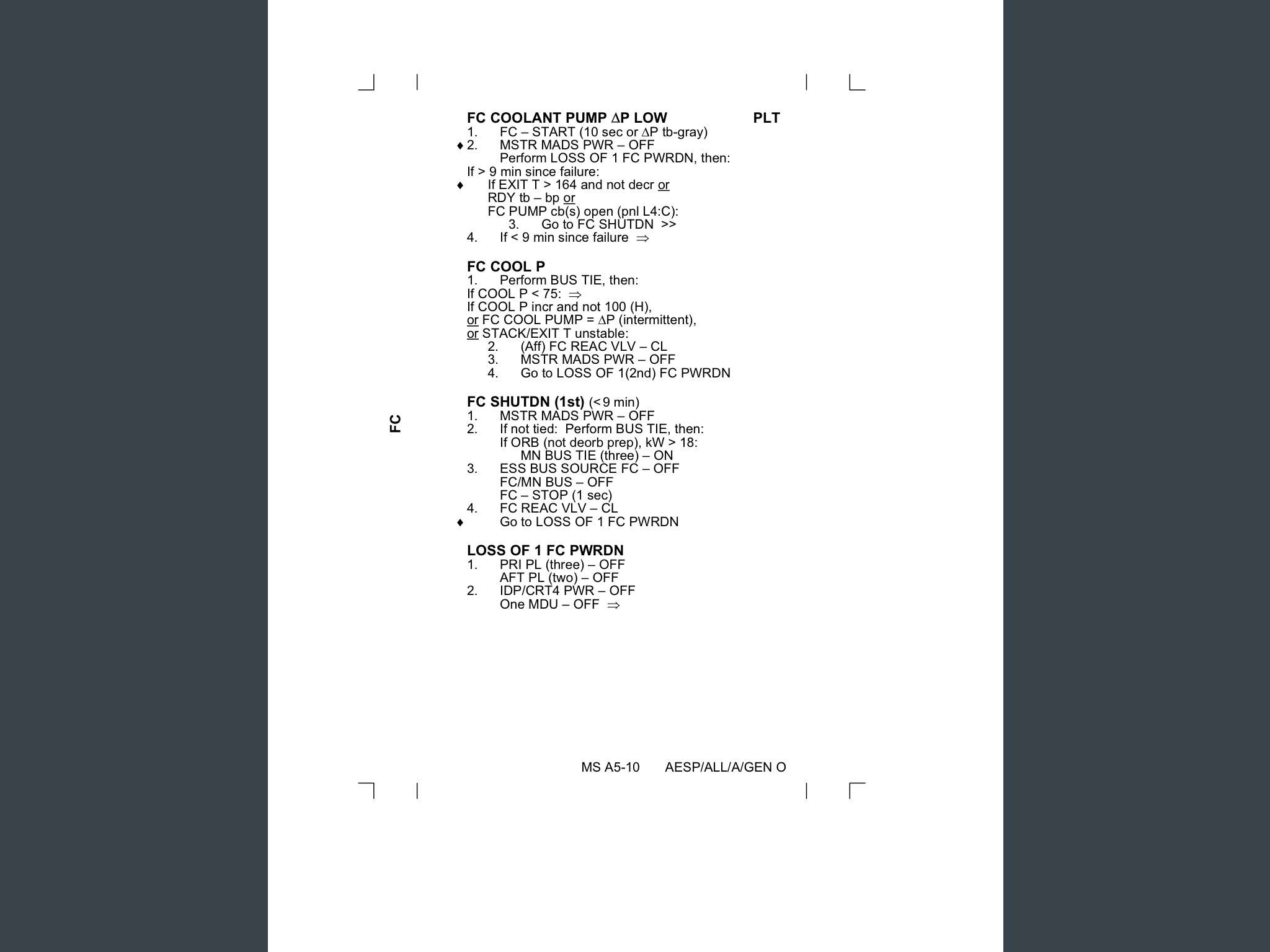
I tried a nice scenario this afternoon, some failures with Fuel Cells and Main Bus, very interesting. I had a look to non normal checklist concerning those kinds of failures, quite time consuming, but interesting to have an idea of what need to be done and what system will be concerned by associated Buses.
Basically, a loss of a main Bus will lead to a shutdown of the associated Fuel Cell later on. Some Bus Tie are available to link a Good Bus to the bad one and provides power like if nothing happened. ( 1 Fuel cell powering 2 Main Buses)
Consequences of the loss of a main bus will have impact also on AC Associated bus, which can impact SSME an APU powering ( double redundance "only", not triple like systems linked to Essential bus)
So loss of main is almost negligeable, loss of two begins to be critical and decision making will be essential.
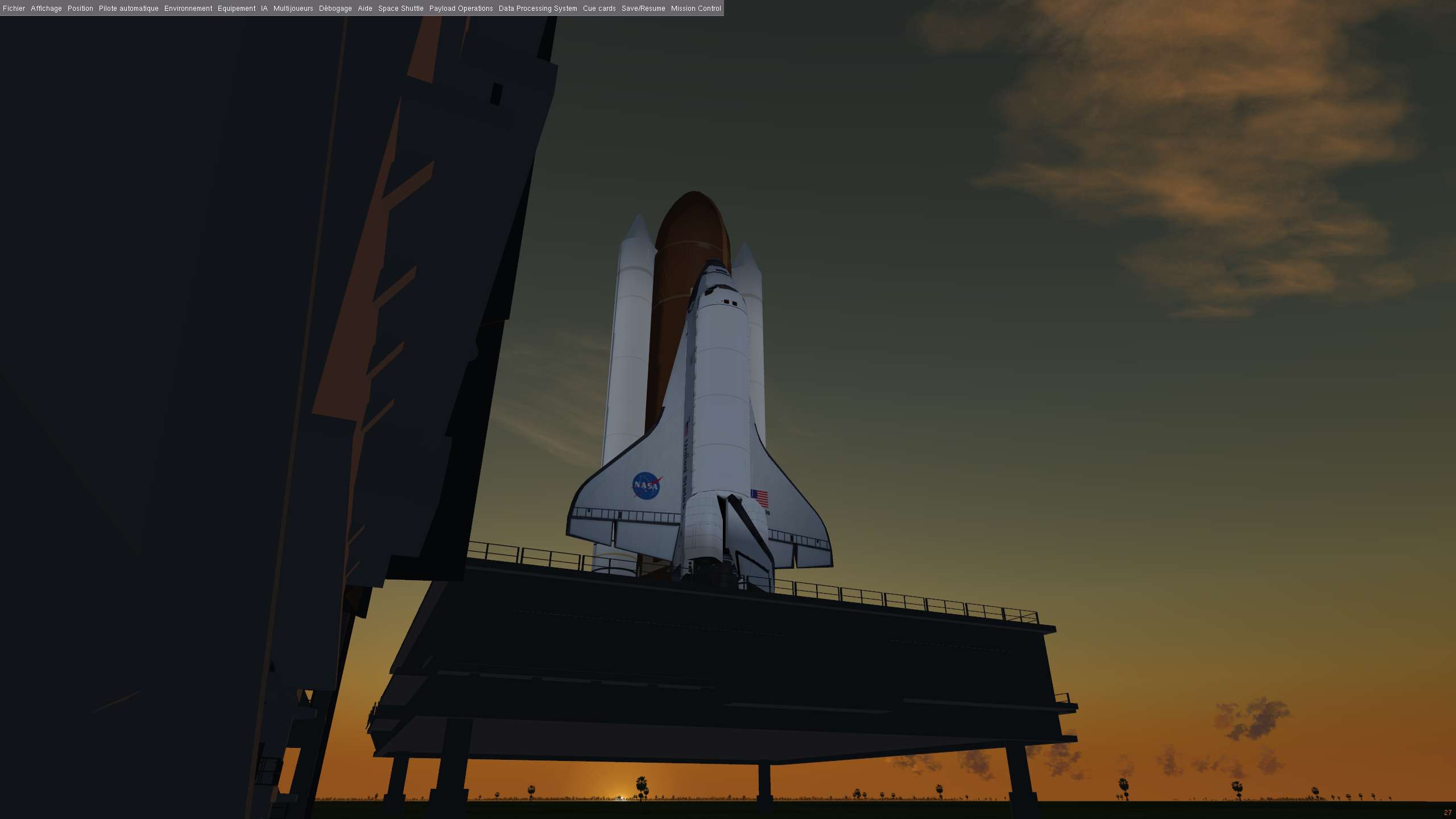
Let's start our journey, by a warm evening on the East Coast, almost no clouds in the sky, beautifull sky and some Altostratus waiting to be ripped off by the Shuttle.
Launch was delayed by some false warning indications now cleared.
Final countdown begins, final adjustement are made, APU starts and IMU pre launch alignement are completed. PASS software transfers his State Vector to the Backup System, let's hope it will not be activated.
A view from camera 1, everything looks good so far,
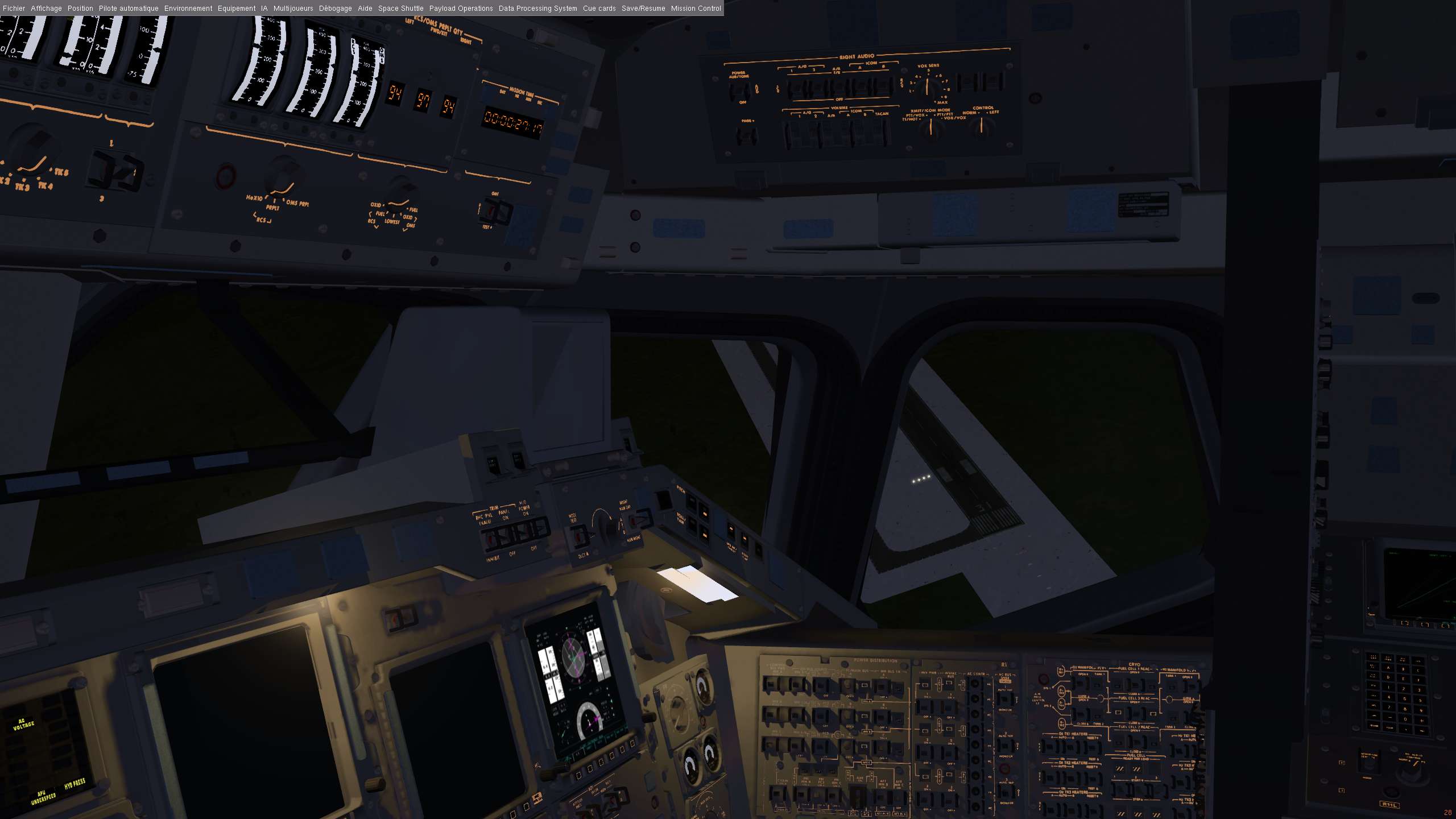
View from the pilot side is quite astonishing, let's have a good deep breath before the stress of the 3 G's
T-6 s, SSME ignitions, nominal thrust reached, SRB activation, We have a LiftOff.
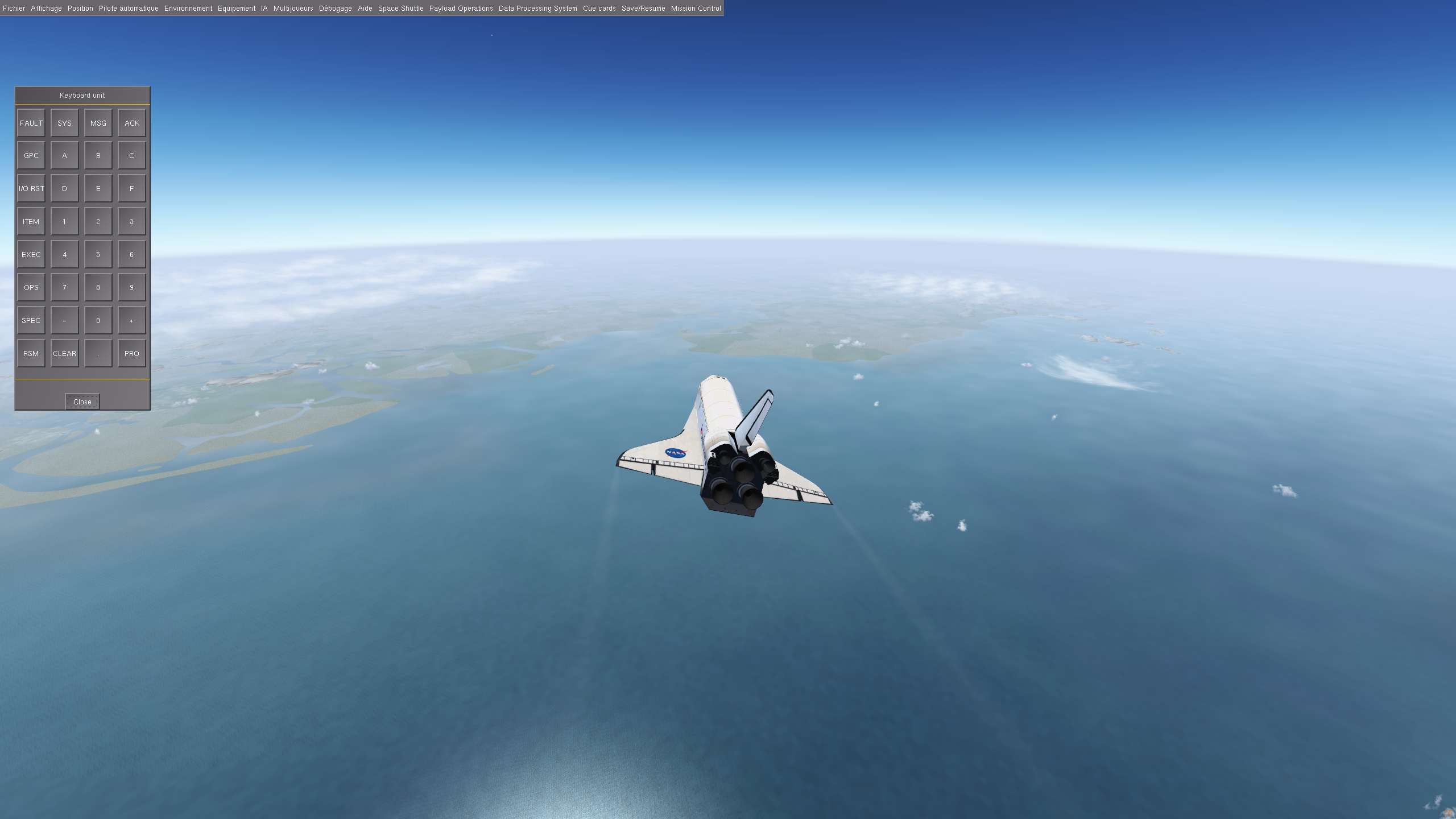
Everything is looking good, bucket is approaching and maximal dynamical pressure is now Behind.
Master Caution comes alive, Main Bus Undervoltage, AC Voltage, and some Black MDU, Let's have a look to the SM BFS System page
All right, seems we have some issues with Main Bus A, FC 1 is still alive, and AC 1 is lost so far. MCC confirms our diagnostic, but no rush, everything else is looking good, no abort so far.
Most of the systems have double redundancy, some even triple redudancy.
Let's have a look and reconfigure the systems that are working on MnA or AC 1.
Some concerns about Avionics Bay one fan which are working on AC 1, temperature is rising.
Let's switch it on AC 2, Temperature is decreasing now, good.
Next move will be a BUS Tie on MCC call ( it's normally not recommanded before MECO, but you know curiosity...), we gonna connect Main B to Main A, switching off AC 1 and inverter switches before Cross Tie and putting them back then.
It seems to work, MDU are back, and MnA and AC 1 are alive again, taking load from FC 2
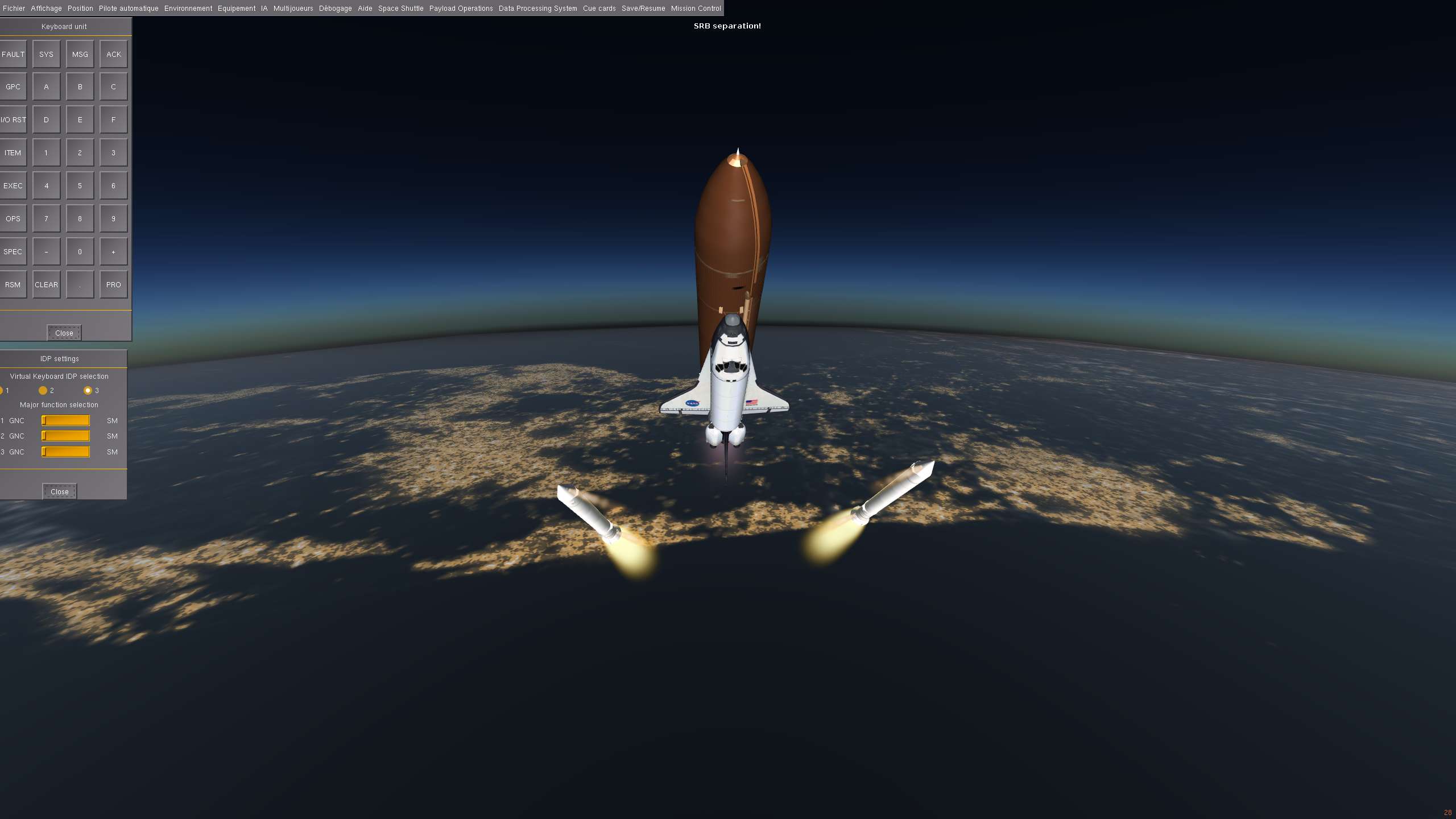
Everything is back under control, everyone is sweating, and SRB separation happens, we are 2 mn10 sec into the flight.
And here we are again, the worst case scenario is happening, another Master Caution Alarm and blank MDU. What now? Cockpit is looking dark and stress is rising.
Let's have a quick glance on SM page: Main A and B, AC1 and AC 2 are lost, Essential Bus are still showing good voltage due to triple redudance.
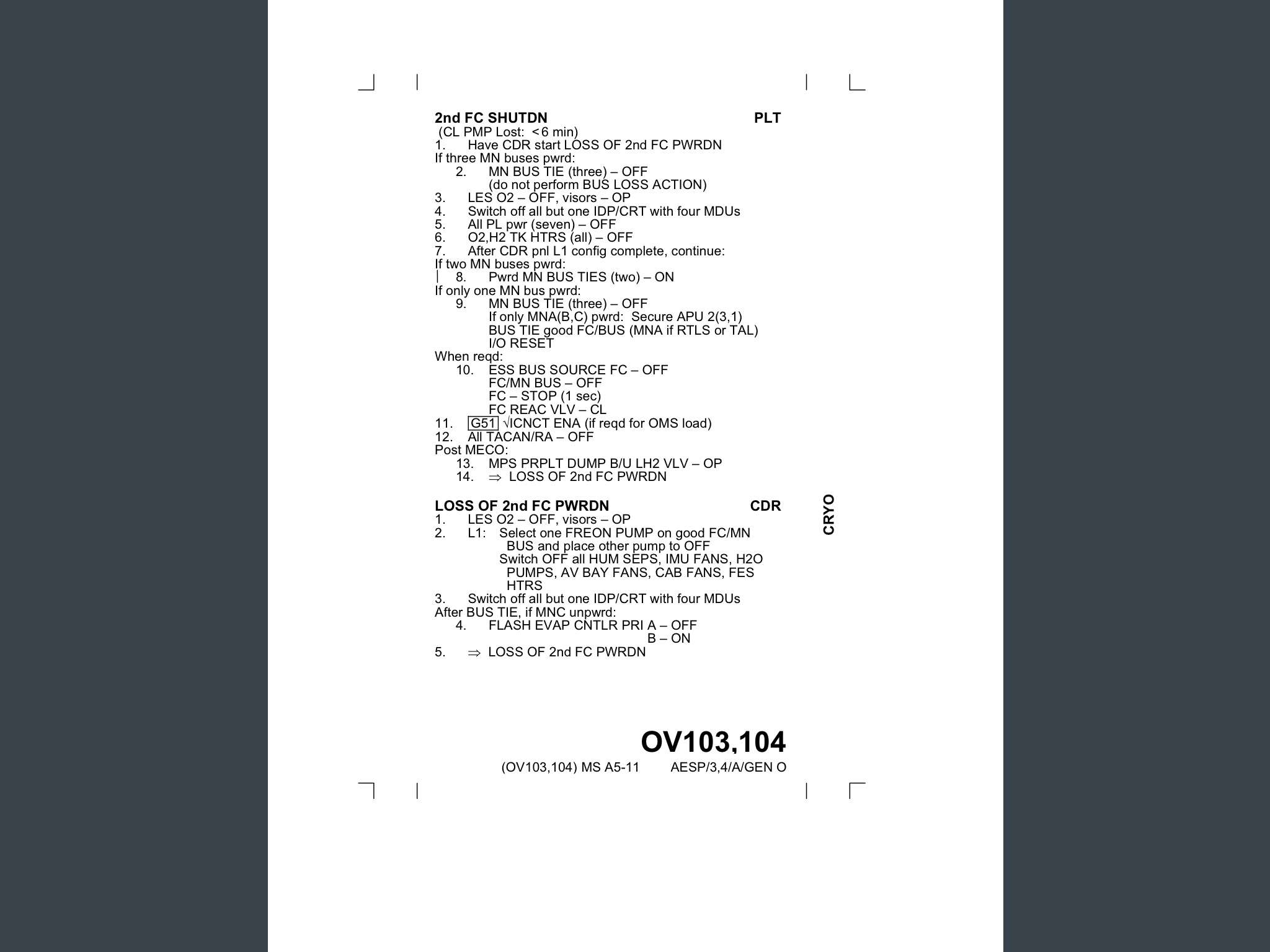
FC 1 and FC 2 are shutdown as per Checklist, and no Bus Tie available.
Fuel cell 1 and 2 secured in Off position
And to top it all, as we lost two AC sources, two controllers of one engine are lost, so is the engine and one APU is also lost, Phew. Situation is rapidly degradating
Here are the SSME controllers, we lost AC 1 and AC2, so center engine is lost
Also, on SM page we can see that APU 1 is out of service, which means a thrust lockup on center engine, hopefully, no lock up on available engines.
So we are approaching 3mn40, MCC took a decision between RTLS and TAL , two Main Buses Down mean a RTLS, It's a highly time critical failure, no time to cross the Atlantic and to wait for a complete Electrical failure.
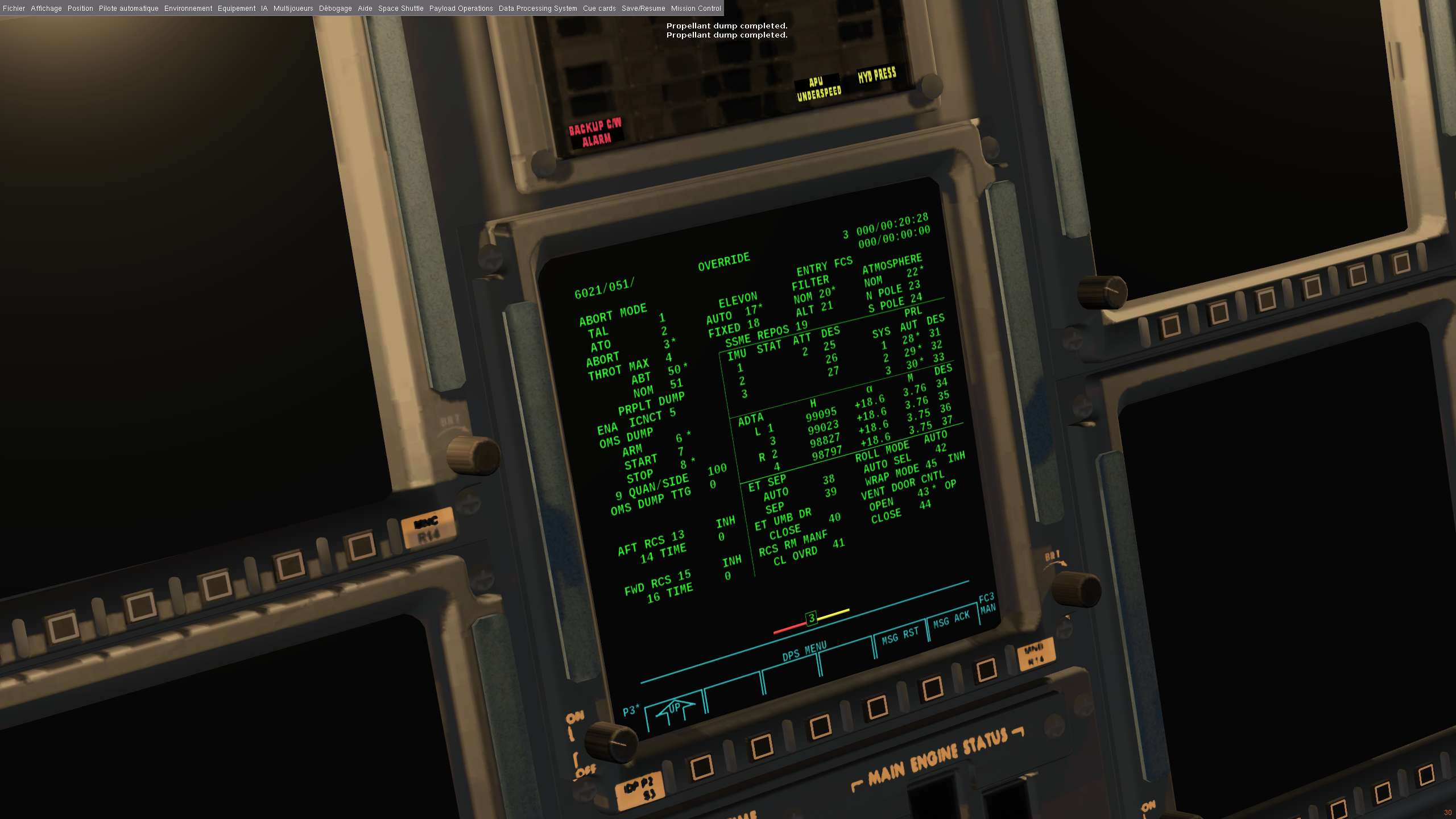
Commander took time to select the correct Abort Mode, here we are, abort initiated and OPS 6 is alive.
Ok, now it's time to see what is working or not, so no Main A and B, no AC 1 and 2, let's have a look to the Environmental and Thermal Panel on L2 side.
So we lost for sure some systems, but let's try to save what we can.
IMU Fan is switched on C ( AC 3), Avionics Fan from bay 2 and 3 are switched to AC 3, Avionics Bay Fan 1 is lost, temperature is rising a lot
Let's continue our Diagnostic, One Water Loop is lost, hopefully Loop 2 is switched on AC 3 and Freon Interchanger will work
We lost also one Freon Loop, the other is working well.( on the picture above, Freon Flow from loop 2 sensor is alive, good )
On the next one, we see no flow on loop 1
Primary A FES is powered by Mn C, so it works. For later in the entry, Ammonia Boiler will be available on Primary B controller, good.
Air System 2 is also activated in case system 1 fails .
So, let's sum up.
We still have 2 engines and 2 APU, no lock up.
Thermal systems works, one H2O loop, one Freon loop and at least one FES and Ammonia boiler work.
IMU Bay air circulation is ok.
Air system and pressurisation ok.
So vital systems are working so far.
It's gonna be a normal RTLS, with some limited access to CRT and MDU, that's gonna be the complicated part, switching between SM and OPS 6/Spec 50/Spec51
We are heading back to KSC, MCC is on fire:
It's becoming very dark inside, Guidance convergence is optimal and PPD approaches
Alpha recovery phase
It's time for the Glide Return To Launch Site, tremendous view
Time for the probes to be out, we can see on Spec 51 what the probes are measuring under ADTA ( Altitude, angle of attack and Mach) and compared it to what IMU is displaying on ADI, then we can intregate via Spec 50 the ADTA value to the guidance loop and Altitude coming from ADTA to navigation filter to affinate the State vector.

")






















![url]](http://[url]http://imageshack.com/a/img924/9982/OQ6Ahd.png[/url])
![url]](http://[url]http://imageshack.com/a/img922/3817/RoPiin.png[/url])
![url]](http://[url]http://imageshack.com/a/img924/4884/txpZ5o.png[/url])
![url]](http://[url]http://imageshack.com/a/img924/5797/7s2vx7.png[/url])
![url]](http://[url]http://imageshack.com/a/img923/1351/WserM9.png[/url])
![url]](http://[url]http://imageshack.com/a/img922/2043/odfKsY.png[/url])
![url]](http://[url]http://imageshack.com/a/img922/7117/Yrqu7u.png[/url])
![url]](http://[url]http://imageshack.com/a/img923/8923/h7Ukk0.png[/url])
![url]](http://[url]http://imageshack.com/a/img922/2039/Rhqgrr.png[/url])
![url]](http://[url]http://imageshack.com/a/img922/4776/p90OIw.png[/url])
![url]](http://[url]http://imageshack.com/a/img922/1584/wkVpuM.png[/url])
![url]](http://[url]http://imageshack.com/a/img924/4141/dVupd9.png[/url])
![url]](http://[url]http://imageshack.com/a/img923/9743/WEyDFf.png[/url])
![url]](http://[url]http://imageshack.com/a/img924/6483/xP5hv6.png[/url])
![url]](http://[url]http://imageshack.com/a/img922/9523/ib9a4j.png[/url])
![url]](http://[url]http://imageshack.com/a/img922/5301/QweIUy.png[/url])
![url]](http://[url]http://imageshack.com/a/img923/2452/rC3v8I.png[/url])
![url]](http://[url]http://imageshack.com/a/img923/5344/h750sv.png[/url])
![url]](http://[url]http://imageshack.com/a/img922/1166/jGCs37.png[/url])
![url]](http://[url]http://imageshack.com/a/img922/3410/w4ZT3P.png[/url])
![url]](http://[url]http://imageshack.com/a/img922/6755/awry33.png[/url])
![url]](http://[url]http://imageshack.com/a/img922/4627/70QZuI.png[/url])

![url]](http://[url]http://imageshack.com/a/img923/5612/mxZvUt.png[/url])
![url]](http://[url]http://imageshack.com/a/img923/9716/fjvC09.png[/url])
![url]](http://[url]http://imageshack.com/a/img923/2484/VE3xQw.png[/url])














")


