NASA / NASA JPL:
Curiosity Rover Nearing Yellowknife Bay
December 11, 2012
Mars Science Laboratory Mission Status Report
PASADENA, Calif. -- The NASA Mars rover Curiosity drove 63 feet (19 meters) northeastward early Monday, Dec. 10, approaching a step down into a slightly lower area called "Yellowknife Bay," where researchers intend to choose a rock to drill.
The drive was Curiosity's fourth consecutive driving day since leaving a site near an outcrop called "Point Lake," where it arrived last month. These drives totaled 260 feet (79 meters) and brought the mission's total odometry to 0.37 mile (598 meters).
The route took the rover close to an outcrop called "Shaler," where scientists used Curiosity's Chemistry and Camera (ChemCam) instrument and Mast Camera (Mastcam) to assess the rock's composition and observe its layering. Before departure from Point Lake, a fourth sample of dusty sand that the rover had been carrying from the "Rocknest" drift was ingested and analyzed by Curiosity's Sample Analysis at Mars (SAM) instrument.
[table="head;width=450"]{colsp=2}
Click on images for details

|

Layered Martian Outcrop 'Shaler' in 'Glenelg' Area
The NASA Mars rover Curiosity used its Mast Camera (Mastcam) during the mission's 120th Martian day, or sol (Dec. 7, 2012), to record this view of a rock outcrop informally named "Shaler."Image credit: NASA/JPL-Caltech/MSSS
|
Curiosity Traverse Map, Sol 123
This map traces where NASA's Mars rover Curiosity drove between landing at a site subsequently named "Bradbury Landing," and the position reached during the mission's 123rd Martian day, or sol, (Dec. 10, 2012). The inset shows the most recent legs of the traverse in greater detail.Image credit: NASA/JPL-Caltech/Univ. of Arizona

|

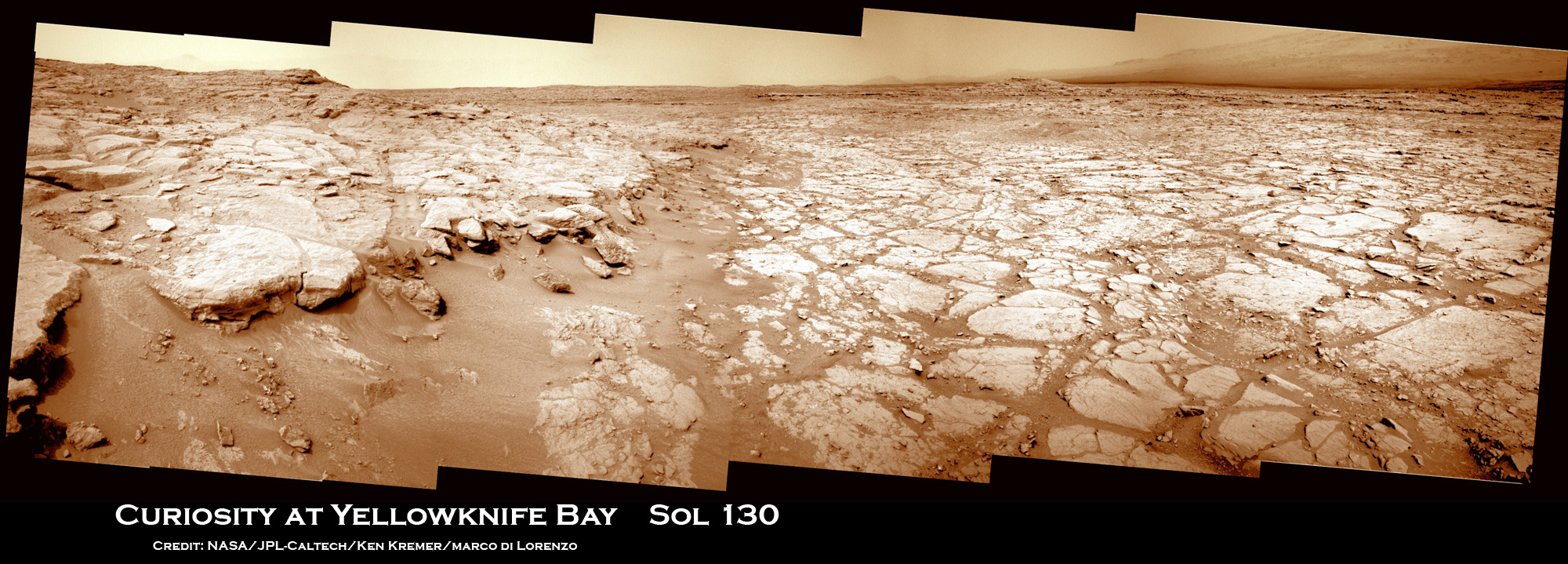
Sol 120 Panorama from Curiosity, near 'Shaler'
The NASA Mars rover Curiosity used its Navigation Camera (Navcam) during the mission's 120th Martian day, or sol (Dec. 7, 2012), to record the seven images combined into this panoramic view.Image credit: NASA/JPL-Caltech
|
Sol 120 Panorama from Curiosity, near 'Shaler' (Stereo)
This stereo panoramic view combines 14 images taken by the Navigation Camera (Navcam) on the NASA Mars rover Curiosity during the mission's 120th Martian day, or sol (Dec. 7, 2012). The scene appears three-dimensional when viewed through red-blue glasses with the red lens on the left.Image credit: NASA/JPL-Caltech
[/table]
Curiosity ended Monday's drive about 30 percent shorter than planned for the day when it detected a slight difference between two calculations of its tilt, not an immediate risk, but a trigger for software to halt the drive as a precaution. "The rover is traversing across terrain different from where it has driven earlier, and responding differently," said Rick Welch, mission manager at NASA's Jet Propulsion Laboratory, Pasadena, Calif. "We're making progress, though we're still in the learning phase with this rover, going a little slower on this terrain than we might wish we could."
Curiosity is approaching a lip where it will descend about 20 inches (half a meter) to Yellowknife Bay. The rover team is checking carefully for a safe way down. Yellowknife Bay is the temporary destination for first use of Curiosity's rock-powdering drill, before the mission turns southwestward for driving to its main destination on the slope of Mount Sharp.
{...}
NASA / NASA JPL:
Mars Rover Self-Portrait Shoot Uses Arm Choreography
December 11, 2012
PASADENA, Calif. - The robotic arm on NASA's Mars rover Curiosity held the rover's Mars Hand Lens Imager (MAHLI) camera in more than 50 positions in one day to generate a single scene combining all the images, creating a high-resolution, full-color portrait of the rover itself.
A larger version of the previously released self-portrait is now available online, along with an animation video showing how it was taken, and a practice self-portrait taken earlier by Curiosity's test-rover double on Earth.
The new version of Curiosity's self-portrait, online at:
http://photojournal.jpl.nasa.gov/catalog/PIA16457, shows more of the surrounding Martian terrain than a version completed last month.
[table="head;width=450"]{colsp=2}
Click on images for details

|
 On the 84th and 85th Martian days of the NASA Mars rover Curiosity's mission on Mars (Oct. 31 and Nov. 1, 2012), NASA's Curiosity rover used the Mars Hand Lens Imager (MAHLI) to capture dozens of high-resolution images to be combined into self-portrait images of the rover. This version of the full-color self-portrait includes more of the surrounding terrain than a version produced earlier (PIA16239).
On the 84th and 85th Martian days of the NASA Mars rover Curiosity's mission on Mars (Oct. 31 and Nov. 1, 2012), NASA's Curiosity rover used the Mars Hand Lens Imager (MAHLI) to capture dozens of high-resolution images to be combined into self-portrait images of the rover. This version of the full-color self-portrait includes more of the surrounding terrain than a version produced earlier (PIA16239).Image credit: NASA/JPL-Caltech/MSSS
|
Camera and robotic-arm maneuvers for taking a self-portrait of the NASA Curiosity rover on Mars were checked first, at NASA's Jet Propulsion Laboratory in Pasadena, Calif., using the main test rover for the Curiosity.Image credit: NASA/JPL-Caltech/MSSS
[/table]
The animation video at:
http://www.nasa.gov/multimedia/videogallery/index.html?media_id=156880341 depicts how the rover moved its robotic arm on Oct. 31 to record the component images that would be combined into the self-portrait. The same software that rover planners use when designing the rover's moves was used to generate the animation.
The arm movements were practiced on Earth first, using the closest double that exists for Curiosity, the Vehicle System Test Bed rover at NASA's Jet Propulsion Laboratory, Pasadena, Calif. The rover team typically uses that rover to test maneuvers before they are tried by Curiosity. The Vehicle System Test Bed's self-portrait, from the engineering model of MAHLI on that rover, is at:
http://photojournal.jpl.nasa.gov/catalog/PIA16458.
MAHLI is mounted on a turret at the end of Curiosity's robotic arm. The arm is not visible in the portrait because the arm was positioned out of the shot in the images or portions of images used in the mosaic. Some images taken during the day show portions of the arm. However, the Martian ground that the arm hides from view in those images is visible in alternative images chosen for the mosaic, taking the arm out of the scene.
{...}
SPACE.com:
Drill Issue Could Threaten Mars Rover Curiosity's Mission
Mars Daily:
Curiosity Rover Nearing Yellowknife Bay
Science Daily: