Not sure what is going on with this
It loads on mine but not on a vanilla.
https://github.com/GATTISPILOT/ARTEMIS2
It loads on mine but not on a vanilla.
https://github.com/GATTISPILOT/ARTEMIS2
 github.com
github.com
So. I need to set the attachment points. and then add the arm to the scn.yes it should be
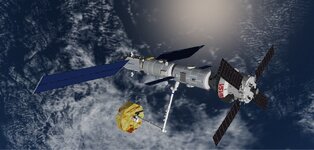
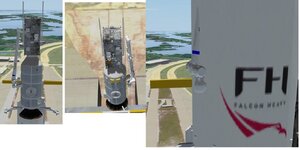
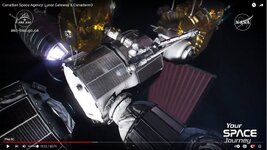
Thanks. I am not sure if it will stick out. Which airlock? I have seen 2 designs the "russian" round one and one that looks like the Ihab. I will just make it sink in.the last NASA plan shows the IHAB taken to the Moon on Artemis 4 flown there by Orion then the RMS taken up on Artemis 5 with the ESPIRT module. Not sure what the plan is now and dont think NASA knows, they are holding up Space X . If there is a way to fold the RMS up to fit might do a Falcon heavy flight with the IHAB, airlock and the folded up RMS on the side of the Air lock


| Length | 15 m | 17 m | 8.5 m |
|---|---|---|---|
| Mass | 410 kg | 1,497 kg | 715 kg (estimation) |
| Diameter | 33 cm (exterior diameter of composite boom) | 35 cm (exterior diameter of composite boom) | 23 cm (exterior diameter of composite boom) |
| Cameras | Two cameras:
| Four colour cameras:
| Six colour 4K cameras:
|
|---|
| Length | 15 m | 17 m | 8.5 m |
|---|---|---|---|
| Mass | 410 kg | 1,497 kg | 715 kg (estimation) |
| Diameter | 33 cm (exterior diameter of composite boom) | 35 cm (exterior diameter of composite boom) | 23 cm (exterior diameter of composite boom) |