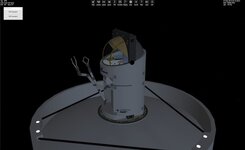
I loaded it in VB. Just to see mesh issues. No Arms yet.
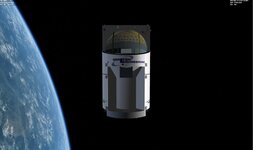
I need to light the interior more. But the exterior is what I need to fix. You can see a line almost down the center. It is a divide between 2 textures. Both are white. One is all white and the other is white with the logo.
I need to light the interior more. But the exterior is what I need to fix. You can see a line almost down the center. It is a divide between 2 textures. Both are white. One is all white and the other is white with the logo.






")