I've got something Freshhhh for you hungry minds out there - the promised visualisation of the direct ascent optimal velocity solver
") http://www.elwico.pl/~ender-sz/orbiter-pdf/pliki/LaunchMFD-da-velOptimum.zip
http://www.elwico.pl/~ender-sz/orbiter-pdf/pliki/LaunchMFD-da-velOptimum.zip
From the help dialog:
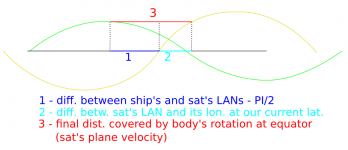
The transfer consists of (currently) 3 phases:
1) Accelerating east to reach a given velocity < orbital velocity
2) Constant velocity flight
3) Bootleg manouevre to equalise velocity vector with the target
Ad. 1) During the 1st phase, the ship accelerates with the main engines, while using the hovers to counter the gravity. The more velocity you build, the greater the centrifugal force, so the less you have to be accelerating with the hovers.
Ad. 2) In the 2nd phase you also need to be countering the resulting gravity, based on the velocity that you have built up, while covering the required distance.
Ad. 3) In the last phase, the greater your velocity was the use more fuel you will use to equalise the velocity vector. Note, that if there's a big angular difference in orbital planes and your velocity was big, then you will have to lessen the velocity vector initially, which will result in lessening your centrifugal force, finally requiring that you use the hovers more.
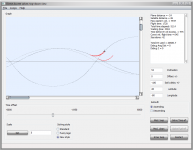
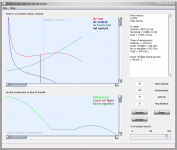
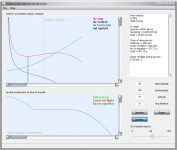
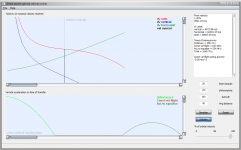
The lower window displays vertical acceleration of all three phases as a function of time.
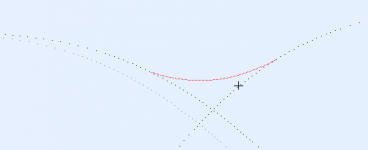
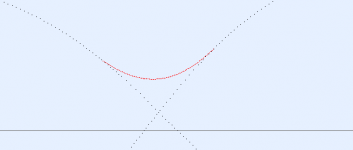
The upper window displays delta v's as a function of the velocity reached in the 1st phase.
I strongly recommend using the velocity slider, which will help you visualise the problem.
The windows are somewhat scalable and the input text edit boxes have important tooltips.
Before doing any calculations, press the Reset button, to get the user values and iterate the velocity for plotting the dv.
In case of any questions, just fire away