This is what I have so far. It uses UACS.
2 docks one dock is the crew transfer and the other at top is for fuel?
Weird. it only shows 1 dock at the top;
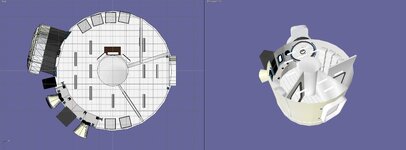
2 docks one dock is the crew transfer and the other at top is for fuel?
Weird. it only shows 1 dock at the top;
UACS::AirlockInfo airInfo; airInfo.name = "MK2"; airInfo.pos = { -6.6,0,0 }; airInfo.dir = { 0,1,0 }; airInfo.rot = { -1,0,0 }; airInfo.hDock = CreateDock({ 2.830, - 3.674, - 0.823 }, { 0.982, 0, - 0.191 }, { 0,1,0 });//2.830 -3.674 -0.823 0.982 0 -0.191 0 1 0 598 SetDockParams(_V(0, 7.31, 0 ), _V(0, 1, 0), _V(0, 0, 1));//ARTAttachments
Last edited: