Some more findings on ion sensors: after finding a missing link (to me) on RGANTD, it seems they used two distinct types over the years, simultaneously in some cases, and would explain some discrepancies. Unclear how they differ functionally.
There's the (seemingly) later type, seen on at least 7K-TM:


Smithsonian mockup with more detail:


But if that's the case, where are they on 7K-OK? Because I've never seen that type of sensor on those, plus the torus in the way of where they'd be:

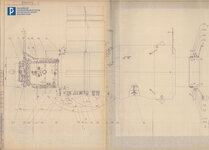
Enter RGANTD and Salyut 4:


Where 4 is identified as ИД-7 and 6 as ИД-М, both simply "Ion Sensor". Curiously, the latter are facing radially, not along the longitudinal axis. Type 4 I had seen before, but not with this connection. Considering 4, the 7K-OK makes more sense as they seem to match the two features on the torus at 3 and 6 o'clock above. Looking also at Soyuz-9, there they are, just about distinguishable:

Curious though that forward facing type 4 aren't really evident on any of the -OK evidence I've seen, except for this (maybe):

As I understand it this is Kosmos-186/188, which would have been #5 and #6 (the IR sensor was introduced on #7 due to ion unreliability). Maybe these were covered later on to help with the recurring issues? I recall there were issues early on with thruster interaction with the ion sensors, among others, per Chertok.
The ASTP documentation backs up the existence of three ion sensors on 7K-TM, but in the next paragraph also backs up what the KSU matrix says: selection is between two sensors, not three. Does this mean only the two aft facing ones have redundancy? Perhaps due to, as in other aspects, the focus on the reentry contingency. The RGANTD stuff does seem to reinforce to me these sensors only work in one direction (with a 60º FOV, which has other implications), so it would make sense to have them at both ends for prograde and retrograde, and would thus make it an imperative that at least one be present on the BO as well, on both 7K-OK and 7K-T.
This is my current struggle, because consistency in what little I have found of 7K-T doesn't exist much and I don't think I've unequivocally found either type on any example. Makes sense that things might have changed a bit over the years, spanning a decade and several stations, but it seems practically impossible to date anything precisely.
Four such examples of varying configurations: