Follow along with the video below to see how to install our site as a web app on your home screen.
Note: This feature may not be available in some browsers.
ORBITER-FORUM will be temporarily closed at 2026-07-23 18:00 UTC while we complete some OF maintenance tasks. The amount of downtime is expected to take up to one hour, but probably less.
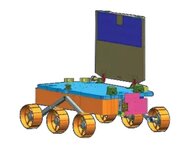
Weird that Pragyan doesn't have steerable wheels...does that mean that it can only travel in one direction? Also iirc the rover has six wheels, not four
Weird that Pragyan doesn't have steerable wheels...does that mean that it can only travel in one direction? Also iirc the rover has six wheels, not four
This site uses cookies to help personalise content, tailor your experience and to keep you logged in if you register.
By continuing to use this site, you are consenting to our use of cookies.
")