Thanks for the stuff :thumbup:
Another question:
I notice with any craft, there is a continuous (annoying
")
) need to switch between rotation/translation RCS modes. Can one implement both modes at the same time with the SDK?
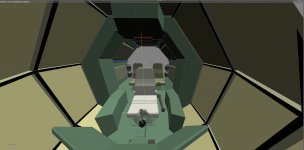
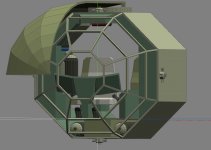
I'm thinking of implementing a helicopter type pit, which more or less covers all aspects on control, with only a RCS on/off switch. (ref: pic)
RCS mode ON
1) Stick, rudder, pedals are for rotation.
2) Yellow hat switches on stick and collective for translation
3) Orange rotational throttle for main engine forward/reverse thrust
4) Collective pitch for up down/thrusters (those rotational engine mounts).
RCS mode OFF
1) Stick, rudder, pedals are for control surfaces
2) Yellow hat switches on stick and collective, for control surface trims.
3) Orange rotational throttle for main engine forward/reverse thrust
4) Collective pitch for up down/thrusters(those rotational engine mounts).
The blue hat switches on the collective for something I've yet to think of.. maybe those rotational engine mounts :facepalm:



")