-
ORBITER-FORUM will be temporarily closed at 2026-07-23 18:00 UTC while we complete some OF maintenance tasks. The amount of downtime is expected to take up to one hour, but probably less.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Discussion Space Shuttle Vessel - Payload Development Thread
- Thread starter GLS
- Start date

Attachment question.
I have a MMU with an attachment for the TPAD or other devices like the the ACd aka Stinger
this is the attachment on the mmu
and then on the acd
I get this when I attach and then reload and it is good?
I have a MMU with an attachment for the TPAD or other devices like the the ACd aka Stinger
this is the attachment on the mmu
TPAD = CreateAttachment(false, _V(-.1, -.12, 0.375), _V(0, -1, 0), _V(0, 0, 1), "TP", false);and then on the acd
MMU = CreateAttachment(true, _V(-0.11, 0, - .5), _V(0,1, 0), _V(0, 0, 1), "TPAD", false);I get this when I attach and then reload and it is good?
Attachments
Are you changing the attachment vectors at any point?Attachment question.
I have a MMU with an attachment for the TPAD or other devices like the the ACd aka Stinger
this is the attachment on the mmu
TPAD = CreateAttachment(false, _V(-.1, -.12, 0.375), _V(0, -1, 0), _V(0, 0, 1), "TP", false);
and then on the acd
MMU = CreateAttachment(true, _V(-0.11, 0, - .5), _V(0,1, 0), _V(0, 0, 1), "TPAD", false);
I get this when I attach and then reload and it is good?
No change. in the MMU it is just a toggle grapple if the TPAD id attachment is in range. In the MMU is a grapple point for the TPAD and then on the ACd is a child labelled TPAD. But no changing.
i wonder if this is it?
i wonder if this is it?
loose If true, allow loose connections (see notesIf the attachment point is defined as loose, then the relative orientation between the two attached objects isfrozen to the orientation between them at the time the connection was established. Otherwise, the two objectssnap to the orientation defined by their dir vectorsYou have it set to false, so it shouldn't be that.i wonder if this is it?
So the child is:
and the MMU is the parent.
in the mmu code there is just create the attachment and attach if the id is correct and in range.
I changed the child to true and no change?
Then I made a simple cfg
and it works. I will remake the dll
MMU = CreateAttachment(true, _V(-0.11, 0, - .5), _V(0,1, 0), _V(0, 0, 1), "TPAD", false); and the MMU is the parent.
TPAD = CreateAttachment(false, _V(-.1, -.12, 0.375), _V(0, -1, 0), _V(0, 0, 1), "TP", true);in the mmu code there is just create the attachment and attach if the id is correct and in range.
I changed the child to true and no change?
Then I made a simple cfg
; === Configuration file for vessel class G.A.S ===ClassName = STS51ASTINGER1MeshName = STS_PAYLOADSNEW/STS51ASTINGER1Mass = 100Size = 2EnableFocus = FALSE; === Attachment specs ===BEGIN_ATTACHMENTP -0.11 0 -.5 0 1 0 0 0 1 TPAD ;TO CARGOBAYEND_ATTACHMENTand it works. I will remake the dll
Attachments


Last edited:
So I thought I had it fixed. But not so. If I add the vessel to the scn and attach it is good. But in the scn it is attached to the Pallet and then released and then attached to the MMU. then it is wrong? Is the original attachment info being using against the attachment?
The TPAD has 2 attachments to parent, right? Could you be trying to attach to one, without detaching the other? Remember, each vessel can only be attached to one parent at a time. I'm not sure what happens when attempting to attach a 2º parent...So I thought I had it fixed. But not so. If I add the vessel to the scn and attach it is good. But in the scn it is attached to the Pallet and then released and then attached to the MMU. then it is wrong? Is the original attachment info being using against the attachment?
I tried again. here the stinger is detached form the pallet and the mmu is near. I attached and it is wrong.
end of scn
stinger attachment
stinger is not attached
end of scn
stinger:STS_Payloads\Stingertest STATUS Orbiting Earth RPOS -3222858.192 2686729.910 -5177855.550 RVEL 5851.5976 -1950.8213 -4667.5729 AROT -14.979 61.081 -169.062 ATTACHED 0:1,MMU3 AFCMODE 7ENDstinger attachment
; === Attachment specs ===BEGIN_ATTACHMENTP -0.11 0 -.5 0 1 0 0 0 1 TPAD ;TO MMUP 0 0 -.5 -1 0 0 0 0 1 STW ;TO CARGOBAYP .6185179 0 -.2059909 .7 0 -.7 0 0 1 GF ;TO RMSC 0 0 .21 0 1 0 0 0 1 SATEND_ATTACHMENTstinger is not attached
stinger:STS_Payloads\Stingertest STATUS Orbiting Earth RPOS -3410892.508 2748268.586 -5022344.580 RVEL 5706.1757 -1831.8340 -4891.1327 AROT -14.400 62.912 -169.479 VROT -0.0064 0.1784 0.0895 AFCMODE 7END
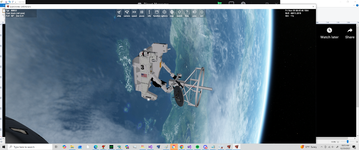
Maybe the rotation vector (the last one) should be (0, 1, 0)? It should point "up", i.e., to there the camera target is.I have having troubles trying to attach the RMS to the Solar max. I believe the location is correct

Looks like the bottom...Thanks. I have the camera target at the bottom. Should it be at the top? I couldn't find any good images of the target looks like target is at the bottom of the Solar Max

... assuming we are looking at the bottom, at least that is where the RMS camera is.

So the attachment location is ok, the orientation vector should be out and the rotation vector down.Yes, I think this is correct
- Joined
- Feb 4, 2008
- Messages
- 9,758
- Reaction score
- 1,028
- Points
- 203
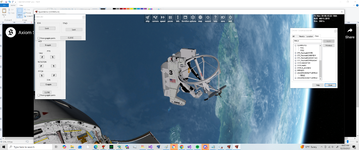
Noticed that you have an SSRMS Power and Data Grapple Fixture (PDGF) there. Should be a Flight Releasable Grapple Fixture (FRGF). All dimensions are in inches.Yes, I think this is correct
Dropbox
 www.dropbox.com
www.dropbox.com
gattispilot has been working on stuff for 51A, and we are running into attachment point issues, particularly with parent-child stuff. can you chain multiple children together? and the main issue is when we try to grapple these assemblies with the RMS, we have to detach everything else from the vessel with the grapple fixture, which makes the retrieval impossible. would using docking ports be better or is there something we are missing?
Thanks. I can change itNoticed that you have an SSRMS Power and Data Grapple Fixture (PDGF) there. Should be a Flight Releasable Grapple Fixture (FRGF). All dimensions are in inches.
Dropbox
You can have at the same time:gattispilot has been working on stuff for 51A, and we are running into attachment point issues, particularly with parent-child stuff. can you chain multiple children together? and the main issue is when we try to grapple these assemblies with the RMS, we have to detach everything else from the vessel with the grapple fixture, which makes the retrieval impossible. would using docking ports be better or is there something we are missing?
- vessel A (parent) attached to vessel B (child)
- vessel B (parent) attached to vessel C (child)
- vessel C (parent) attached to vessel D (child)
But you cannot have 2 vessels playing parent to another vessel at the same time:
- vessel A (parent) attached to vessel C (child)
- vessel B (parent) attached to vessel C (child)
This is solved (internaly) in SSV, to allow grappling a payload attached to the PLB, by having the RMS and PLB latches "talk" to each other and behaving as if both were attached to the payload at the same time, although only one of them has the attachment at any time. A few months ago, likely somewhere in this thread, I proposed an extension to that, so other vessels could "join in the conversation" and thus allowing a payload in a cradle, or another arm grappling payloads in the PLB, etc.
But this won't really work in a MMU-sat-RMS case... when the RMS grapples, even if it "fake-grapples", the MMU-sat group is still loose. And grappling means the MMU has to release...
I'm not sure a docking port would work in the RMS... but maybe it could replace (some) other attachments.
so if the MMU is parent to the Stinger, the RMS cant grapple to be parent to the Stinger as well? could the Stinger be the parent object instead?You can have at the same time:
etc
- vessel A (parent) attached to vessel B (child)
- vessel B (parent) attached to vessel C (child)
- vessel C (parent) attached to vessel D (child)
But you cannot have 2 vessels playing parent to another vessel at the same time:
- vessel A (parent) attached to vessel C (child)
- vessel B (parent) attached to vessel C (child)
This is solved (internaly) in SSV, to allow grappling a payload attached to the PLB, by having the RMS and PLB latches "talk" to each other and behaving as if both were attached to the payload at the same time, although only one of them has the attachment at any time. A few months ago, likely somewhere in this thread, I proposed an extension to that, so other vessels could "join in the conversation" and thus allowing a payload in a cradle, or another arm grappling payloads in the PLB, etc.
But this won't really work in a MMU-sat-RMS case... when the RMS grapples, even if it "fake-grapples", the MMU-sat group is still loose. And grappling means the MMU has to release...
I'm not sure a docking port would work in the RMS... but maybe it could replace (some) other attachments.
Similar threads
- Replies
- 0
- Views
- 2K
- Replies
- 7
- Views
- 4K
- Replies
- 21
- Views
- 19K
- Replies
- 0
- Views
- 5K
- Replies
- 95
- Views
- 30K