You can use Lagrange's identity:
Then, after rewriting them per component, you've got 3 differential equations with known quotients.
So I've done this, I have my system of 6 ODEs. Refering to the original system I posted in the OP, I have equations that refer to Ac_x, Ac_y, Ac_z, alpha_x, alpha_y, and alpha_z (and d(alpha_x)/dt, etc etc etc). Now... who's got a good way of solving this beast? :rofl: I've run it through TI's Derive, but that comes up with just "[]" and my MATLAB install (and thus the symbolic_toolbox) seems to be having issues. I don't suppose there exists trial versions of Maple or Mathematica?
---------- Post added at 01:00 PM ---------- Previous post was at 11:31 AM ----------
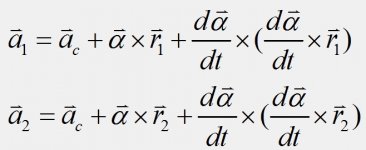
After getting MATLAB working, I have attempted to solve the system of equations, which appears as:
Code:
a1x = acx - r1x*(omega_y^2 + omega_z^2) + r1y*(omega_x*omega_y - alpha_z) + r1z*(alpha_y + omega_x*omega_z)
a1y = acy + r1x*(alpha_z + omega_x*omega_y) - r1y*(omega_x^2 + omega_z^2) + r1z*(omega_y*omega_z - alpha_x)
a1z = acz + r1x*(omega_x*omega_z - alpha_y) + r1y*(alpha_x + omega_y*omega_z) - r1z*(omega_x^2 + omega_y^2)
a2x = acx - r2x*(omega_y^2 + omega_z^2) + r2y*(omega_x*omega_y - alpha_z) + r2z*(alpha_y + omega_x*omega_z)
a2y = acy + r2x*(alpha_z + omega_x*omega_y) - r2y*(omega_x^2 + omega_z^2) + r2z*(omega_y*omega_z - alpha_x)
a2z = acz + r2x*(omega_x*omega_z - alpha_y) + r2y*(alpha_x + omega_y*omega_z) - r2z*(omega_x^2 + omega_y^2)
Solving for the Ac terms (x y z) and the omega terms (x y z) is what I'm after. The reason I solve for omega is because omega is d(alpha)/dt, which means I immediately have a solution I can plug into the numerical integrator I've written. The Ac terms are also unknowns, and not related to alpha or omega directly, so I might as well solve for it as well.
Now, when I try to solve that system the way I described, it appears as if the solver algorithm cannot find a solution (runs and runs and runs...). Admittedly, I'm keeping omega a distinct term, meaning that the symbolic software in MATLAB doesn't understand the d(alpha)/dt = omega relationship. I suppose this could be the source of the issue, but since MATLABs differential equation solver doesn't appear to accept some variables as known constants, I'm having issues using that function. Anyone have any hints?
")


