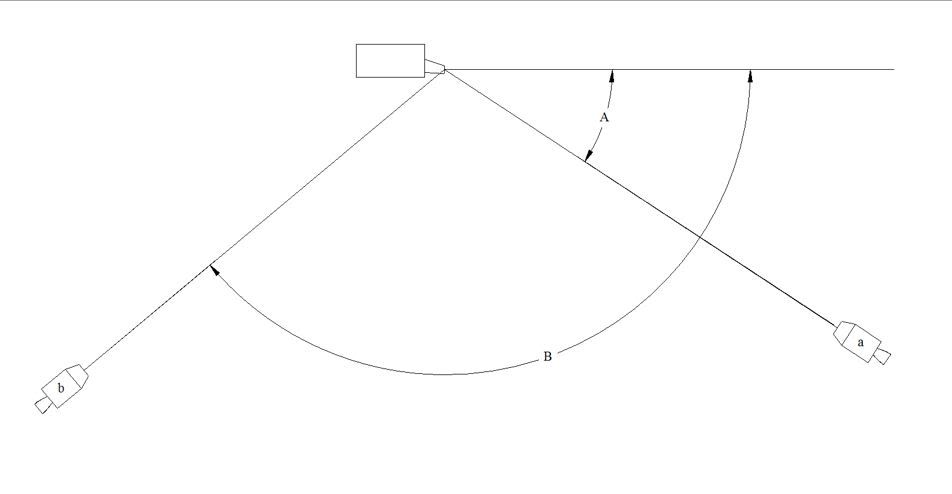
@ArtLav: Loving it man, but I notice one this that I think (like I know what I'm talking about, NOT!) should be easy to do. AP docking vectors sideways toward the docking port, often making it pass though parts of the ISS or other space station, and overall not being "prototypical".
How hard would it be to make it approach a point that is 100m directly out from the docking port and then have it fly straight ahead and dock?
Maybe it's crazy hard, I don't know....
@Ripley: I have
Vanilla Orbiter 2010 P1
Thortons ISS (w/ TMA and Progress)
Thortons Soyuz Launch Vehicle (Proton? can't remember)
That's all...
EDIT-UPDATE- I just checked and did the following. Started built in Shuttle Atlantis and the 2 DG race scenarios in my regular install, then with Hi-Res KSC, then with Oribiter "repaired" by the installer. Each time LC39 and the Runway were in the same location. Each time the shuttle (default one, not the 4.7 one) was on the pad, each time the DG was off to the side from the runway.
")